两柱式机械立体停车设备控制程序设计
随着城市化的快速发展,停车难问题日益突显。为了提高城市停车的效率与空间利用率,两柱式机械立体停车设备逐渐成为一种创新解决方案。这种设备通过合理的机械结构和智能控制系统,使车辆的停放和取出变得更加便捷和高效。控制程序的设计在其功能实现和操作体验中占据着极为重要的地位。本文将深入探讨两柱式机械立体停车设备控制程序的设计原理、关键组件、功能模块及其未来发展趋势。
一、两柱式机械立体停车设备的基本原理
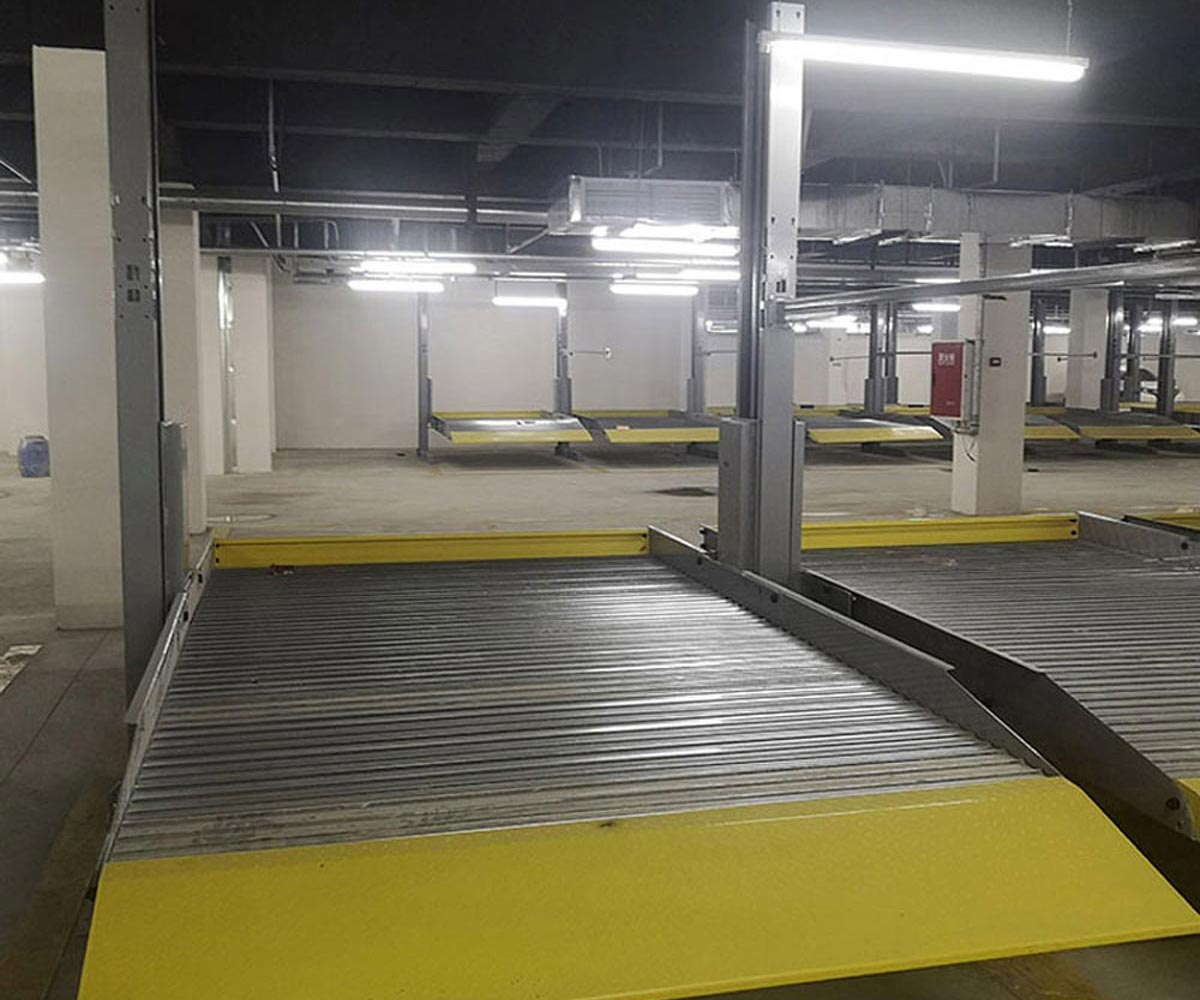
两柱式机械立体停车设备主要由两个支柱和承载平台组成,车辆可通过上下升降、左右移动进行停放。控制程序的设计主要负责协调运动机制、传感器、用户交互界面等各个部分,以确保设备的安全、稳定、高效运行。
在设计控制程序之前,首先需要了解设备的工作流程:
1.用户通过操作界面或APP发送停车或取车请求。
2.控制程序接收请求,判断当前停车位的使用状态。
3.若停车位可用,则控制系统指令设备运动,将车辆转移到指定停车位。
4.取车时,控制程序将指令设备将车辆从停车位转移到出口,实现取车。

二、控制程序设计的关键组件
1.硬件接口
控制程序需与设备的硬件部分实现有效对接,包括电机控制、传感器接口等。对电机进行精准控制,以保障设备的运行速度和稳定性;同时,传感器则能及时反馈设备的状态,确保运行时的安全。
2.运动控制模块
该模块负责精确控制设备的升降、移动等动作。使用步进电机或伺服电机时,控制程序需要制定相应的控制策略,包括速度、加速度和行程距离的设定,以确保设备的运转平稳和精准。
3.传感器模块
一系列传感器,如光电传感器、限位开关等,可以提供设备的实时状态信息,包括车辆是否在位、运动轨迹是否正常等。控制程序需要对传感器数据进行处理与解析,以做出相应预警或调整。
4.用户交互界面
A用户交互界面是用户与控制系统之间的重要桥梁,通常包括触摸屏、按键面板、或手机应用。控制程序应实现易于理解的操作指南,简化用户操作流程,提升使用体验。
5.上位机系统
为了便于设备的管理与维护,上位机可以与控制程序进行通信,实现对设备运行状态的监控和数据的采集。这一部分通常采用计算机软件进行开发,能够收集历史数据、生成报告,并执行远程监控功能。
三、控制程序的功能模块设计
控制程序通常包括多个功能模块,各模块间相互联动,实现整个系统的综合管理:
1.初始化模块
在设备通电或重启时,系统需进行自检,检查各硬件的状态,确保所有电机和传感器正常工作。若在初始化过程中发现故障,则需及时发出警报信息。
2.停车管理模块
该模块负责处理停车请求,判断当前的停车状态、计算最佳停车位,并控制设备完成停车动作。停车管理还要进行停车记录的保存,方便后续的管理与追踪。
3.取车管理模块
取车管理模块与停车模块相类似,但需要考虑用户优先级、停车时间等,当用户请求取车时,系统需根据实际情况调度设备动作,并及时反馈状态信息。
4.安全监控模块
安全监控模块实时监测设备工作状态,分析传感器反馈的信息,并在发生异常时触发紧急停车机制,保障人员和车辆的安全。
5.故障处理模块
设备在运行中可能出现各类故障,故障处理模块需识别故障类型并作出响应,包括记录故障信息、自动报警、或启动应急处理程序,以减少停机时间。
6.数据记录与分析模块
该模块负责收集设备的运行数据,包括停车量、使用频率、故障历史等,为后续的设备优化和管理决策提供数据支持。
四、控制程序的系统架构设计
一套高效的控制程序应具备良好的系统架构,便于后期维护和功能拓展。推荐采用模块化设计方法,每个功能模块独立开发,确保程序的可维护性和可拓展性。此外,还应采用异步处理方法,提高系统的并发性能,避免因单一请求阻塞整个系统的情况。
五、未来发展趋势
随着科技的不断进步,特别是物联网、人工智能等技术的发展,未来的机械立体停车设备控制程序将展现更为广阔的前景:
1.智能化控制
借助机器学习和大数据分析,未来的控制程序能够根据用户习惯和停车需求,进行自我学习和优化,使停车和取车过程更为高效。
2.远程监控与维护
未来将越来越多地引入远程监控技术,操作人员可以通过互联网随时对设备进行监控,实现实时状态分析和远程故障处理。
3.节能环保设计
未来的控制程序将在运行效率和节能方面不断优化,实现低能耗目标,为绿色城市的发展助力。
总结
两柱式机械立体停车设备的控制程序设计是提升停车效率与用户体验的关键因素。通过集成多种先进的软硬件技术,合理的设计思路,可以实现智能化、稳定、安全的停车解决方案。四川莱贝停车设备有限公司将继续致力于技术创新与产品研发,为城市停车管理提供更加智能、高效的设备与系统解决方案。